


Nous sommes l'un des fournisseurs de systèmes d'automatisation industrielle (FA) les plus professionnels de Chine. Nos principaux produits comprennent les servomoteurs, les réducteurs planétaires, les variateurs de fréquence, les automates programmables (PLC) et les interfaces homme-machine (IHM). Nous distribuons des marques telles que Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron, etc. Délai d'expédition : 3 à 5 jours ouvrables après réception du paiement. Modes de paiement : virement bancaire (T/T), lettre de crédit (L/C), PayPal, Western Union, Alipay, WeChat, etc.
Spécifications détaillées
| Article | Caractéristiques |
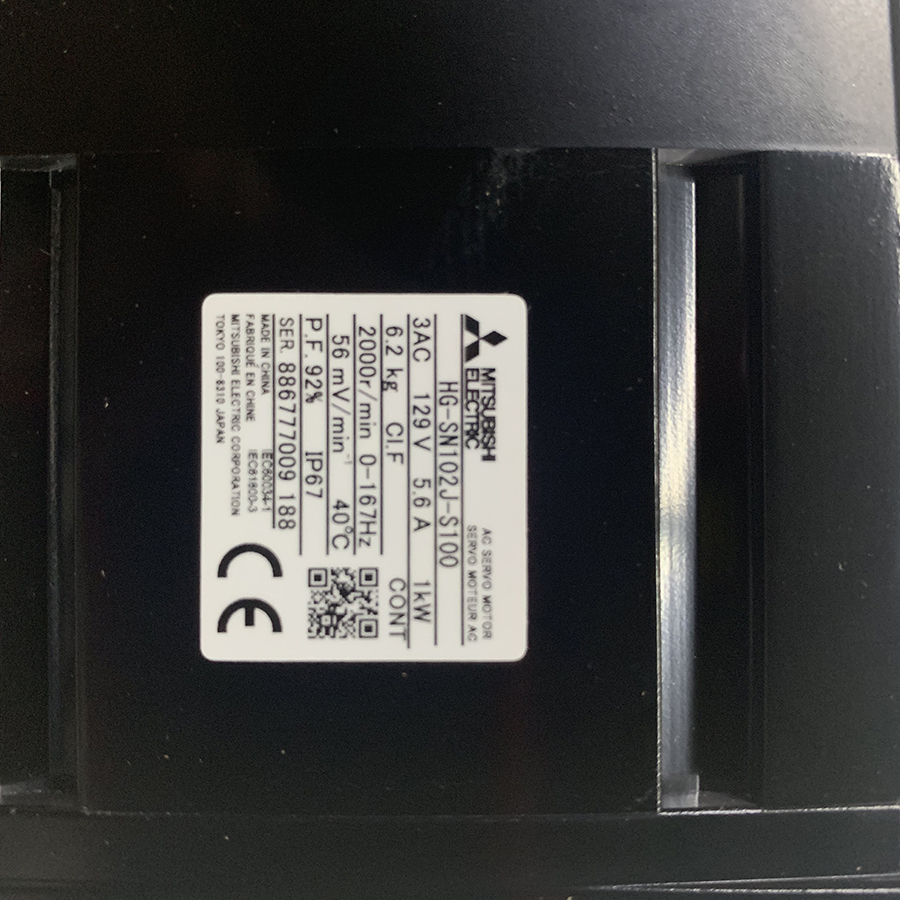
| Modèle | HG-SN102J-S100 |
| Marque | Mitsubishi |
| Nom du produit | servomoteur à courant alternatif |
| Pouvoir | 5,0 kW |
| Tension | 400 V |
| Fréquence | 900 (kHz) |
| Nom de la gamme de produits / de la famille | Série MELSERVO JE |
| Courant nominal | 5,6A |
| Puissance active nominale | 1000 W / 1 kW |
| Degré de protection | IP67 |
| Courant maximal | 17 A |
| Charge radiale maximale | 980 N |
| Charge axiale maximale | 490 N |
| Couple nominal | 4,77 Nm |
| Couple maximal | 14,3 Nm |
| Résolution | 17 bits |
| Taille | 130 mm x 130 mm x 132,5 mm |
| Poids net | 6,2 kg |
Un signal alternatif constant est appliqué à l'enroulement principal du stator. Cependant, comme son nom l'indique, l'enroulement de commande est alimenté par une tension de commande variable. Cette tension est fournie par le servo-amplificateur. Il est important de noter que, pour obtenir un champ magnétique tournant, la tension appliquée à l'enroulement de commande doit être déphasée de 90° par rapport à la tension alternative d'entrée.
Rotor : Le rotor est généralement de deux types ; l'un est de type cage d'écureuil, l'autre de type à godets.
Le rotor de type cage d'écureuil est illustré ci-dessous : rotor cage d'écureuil. Dans ce type de rotor, la longueur est importante tandis que le diamètre est réduit ; construit avec des conducteurs en aluminium, il est donc plus léger. Il convient de noter que les caractéristiques couple-vitesse d'un moteur à induction classique présentent des zones de pente positive et négative, correspondant respectivement aux régions instables et stables.
Cependant, les servomoteurs à courant alternatif sont conçus pour offrir une grande stabilité ; par conséquent, leur caractéristique couple-glissement ne doit pas présenter de zone de glissement positif. De plus, le couple développé par le moteur doit diminuer linéairement avec la vitesse.
Pour ce faire, la résistance du circuit rotorique doit être élevée, avec une faible inertie. C'est pourquoi, lors de la construction du rotor, le rapport diamètre/longueur est réduit. La réduction des entrefer entre les barres d'aluminium du moteur à cage d'écureuil permet de diminuer le courant de magnétisation.
À propos de la série J4 Mitsubishi :
Pour répondre à une gamme d'applications en constante expansion, notamment la fabrication de semi-conducteurs et d'écrans LCD, la robotique et les machines de transformation alimentaire, le MELSERVO-J4 s'intègre aux autres gammes de produits Mitsubishi Electric, telles que les contrôleurs de mouvement, les réseaux, les terminaux graphiques, les automates programmables, etc. Vous bénéficiez ainsi d'une grande liberté et flexibilité pour concevoir un système servo plus performant.
-À propos de la série J5 Mitsubishi :
(1) Progressisme
Pour l'évolution des machines
Amélioration des performances
normalisation des programmes
(2) Connectivité
Pour un système flexible
Configurations
Intégration avec les appareils connectables
(3) Utilisabilité
Pour un démarrage rapide
Amélioration de l'outil
Amélioration de l'ergonomie du système d'entraînement
(4) Maintenabilité
Pour une détection rapide et
diagnostic des défaillances
Maintenance prédictive/préventive
Maintenance corrective
(5) Patrimoine
Pour l'utilisation des installations existantes
(6) appareils
Interchangeabilité avec les versions précédentes
(7) modèles de génération
-À propos de la série JET Mitsubishi
-À propos de la série JE Mitsubishi
-À propos de la série JN Mitsubishi










